
Modern control systems, in which information (e.g., measurements or control inputs) between spatially distributed components (e.g., sensor, controllers or actuator) is communicated over shared communication networks (e.g. CAN, Ethernet), are referred to as Networked Control Systems (NCS).

Within the Networked Control group at the IST, we work towards having a more detailed view of the communication system and taking these details into account when designing controllers.
The main concept behind all of our approaches is to describe important aspects and potentials from communication theory in a mathematically rigorous fashion, and use them to address relevant control theoretic questions.

We develop communication abstractions for network effects and incorporate them into analysis of systems and the design of controllers.
Our goal: theoretic guarantees (such as stability, performance, robustness) on the closed-loop in presence of unreliable communication channels.
Example: switched system with graph-based switching. Unreliability of comunication channels is captured by the combination of a graph and a family of systems.
Interpretation:
- Vertices encode the current state of the communication un-
reliability - Edges represent the system under network effects like
losses, e.g., different linear behavior
Applications:
This system class models many important real world problems, e.g., dropouts in NCS, deadline misses in real-time control, resource allocation, ...
Contact Persons: Frank Allgöwer, Michael Hertneck, Simon Lang, Marc Seidel
Publications:
- Marc Seidel, Simon Lang, Frank Allgöwer
On l2-performance of weakly-hard real-time control systems
European Journal of Control, p. 101056, Jun. 2024. - Steffen Linsenmayer, Frank Allgöwer
Stabilization of networked control systems with weakly hard real-time dropout description
in Proc. 56th IEEE Conference on Decision and Control (CDC), Melbourne, Australia, 2017, pp. 4765 - 4770. - Rainer Blind, Frank Allgöwer
Towards networked control systems with guaranteed stability: Using weakly hard real-time constraints to model the loss process
in Proc. 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 2015, pp. 7510 - 7515.
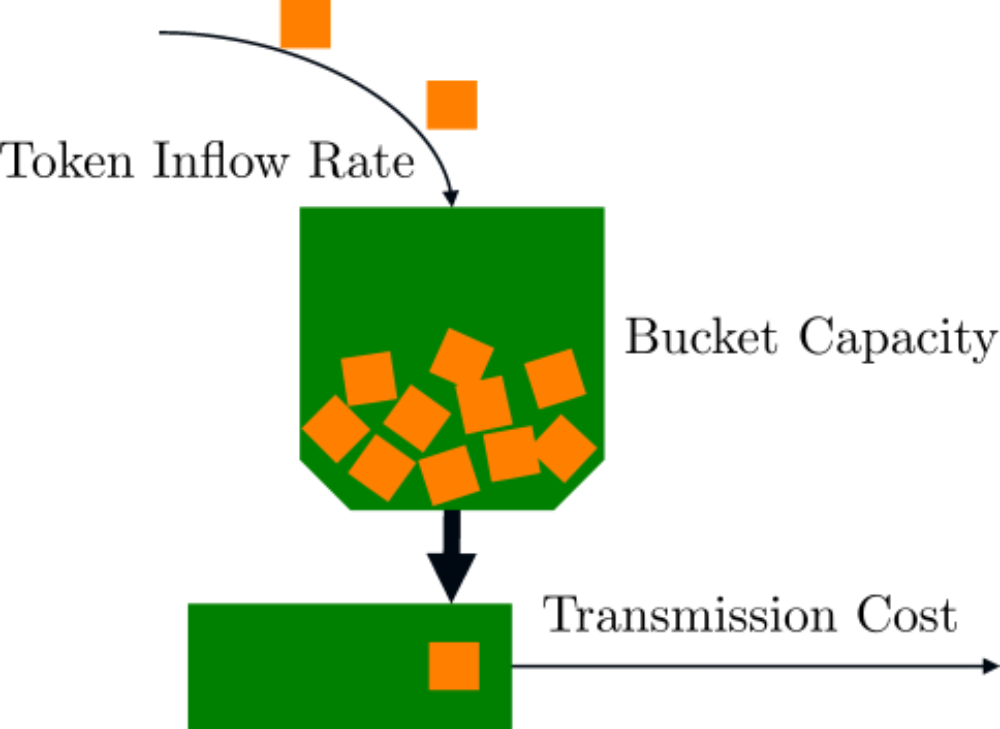
When information is transmitted over a shared and possibly wireless channel, a number of applications communicate over the same network. Especially in such scenarios, communication resources are limited, such that it is advantageous to use the offered resources in an optimal way. For control applications in particular, a priori designed data transmission schedules (e.g. periodic schedules) are almost always suboptimal: control tasks require a lot of communication during precarious operating conditions, while when in a converged state, a much lower amount of communiation typically suffices.
With our research, we consider the novel approach to use an explicit dynamical model of the network's communication capacity, the token bucket model, to determine when information should be sent. By leveraging Model Predictive Control (MPC) to control both plant and network in a unified manner, both transmissions of new control values are scheduled and the corresponding control values are determined, optimizing a finite-horizon performance criterion. We investigate the interplay between control applications and the network and determine criteria under which desired control objectives, such as stability and a certain level of performance, can be ensured.
Contact Persons: Frank Allgöwer, Stefan Wildhagen
Publications:
- S. Wildhagen, M. A. Müller and F. Allgöwer.
Economic MPC Using a Cyclic Horizon with Application to Networked Control Systems
in Proc. 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS), Vienna, Austria, 2019 (Accepted).
- S. Wildhagen, M. A. Müller and F. Allgöwer.
Predictive control over a dynamical token-bucket network
in IEEE Control Systems Letters, Vol. 3, Iss. 4, pp. 859 - 864, 2019.
- S. Linsenmayer and F. Allgöwer.
Performance oriented triggering mechanisms with guaranteed traffic characterization for linear discrete-time systems
in Proc. European Control Conference (ECC), Limassol, Cyprus, 2018, pp. 1474-1479.

When communication resources are limited, it may be favourable to determine transmission instants online based on the current system state instead of using traditional periodic sampling with fixed transmission intervals. This leads to a feedback interpretation of the communication process instead of the open loop approach that results from periodic transmissions.
Important questions in this area include not only identifying suitable trigger conditions but also finding appropriate descriptions for the resulting closed-loop system properties, considering network effects, and understanding how these differ between time-triggered, event-triggered, and self-triggered control. In our research, besides developing new triggering concepts, we also focus on better understanding of existing triggering concepts and on the mathematically rigorous analysis and comparison of the performance of event- and self-triggered control to time-triggered control when network effects are taken into account.
In this research direction, we collaborate with Prof. Dragan Nešić from the University of Melbourne, Prof. Duarte Antunes from the Eindhoven Eindhoven University of Technology and Alejandro Maass from the Pontificia Universidad Católica de Chile.
Contact Persons: Frank Allgöwer, Michael Hertneck, David Meister

When studying stabilization problems for continuous-time control systems, the state is usually sampled periodically before being coded and sent over a channel. In such a scenario, fundamental bounds on the necessary bit rate for stabilization are known. On the other hand, a study of Kofman and Braslavsky in 2006 showed that using a sampling mechanism that employs state information, the necessary bit rate for stabilizing an unstable control system with one input and one output can be made arbitrarily small. Recently, this initiated research on the influence of such event-based sampling strategies on the necessary bit rates for given control tasks.
In our research, we consider a setup where the controller is assumed to be static and the coder and decoder are assumed to be memoryless. The first control goal that we are interested in is containability. This system property was first introduced by Wong and Brockett in 1997 for a similar scenario but without event-based sampling. Firstly, we analyzed scalar, unstable, linear control systems with time-varying but bounded transmission delays. After extending our results to uncertainties in the system dynamics, our current research focusses on more general system classes.
In this research direction, we collaborate with Prof. Hideaki Ishii from the Tokyo Institute of Technology.
Contact Persons: Frank Allgöwer, Steffen Linsenmayer
Publications:
-
Steffen Linsenmayer, Matthias A. Müller, Hideaki Ishii, Frank Allgöwer
Event-based Containability for Linear Systems with Arbitrary Small Bit Rates
in Proc. 8th IFAC Workshop on Distributed Estimation and Control in
Networked Systems (NecSys), Chicago, IL, USA, 2019, to appear. - Steffen Linsenmayer, Hideaki Ishii, and Frank Allgöwer
Containability with event-based sampling for scalar systems with time-varying delay and uncertainty
in IEEE Control Systems Letters, Vol. 2, No. 4, pp. 725–730, 2018.
- Steffen Linsenmayer, Rainer Blind and Frank Allgöwer
Delay-dependent data rate bounds for containability of scalar systems
in Proc. of the 19th IFAC World Congress, Toulouse, France, 2017, pp. 7875 - 7880.
Publications
- M. Seidel, M. Hertneck, P. Yu, S. Linsenmayer, D. V. Dimarogonas, and F. Allgöwer, “A Window-based Periodic Event-triggered Consensus Scheme for Multi-agent Systems,” IEEE Transactions on Control of Network Systems, vol. 11, Art. no. 1, Mar. 2024, doi: 10.1109/tcns.2023.3285863.
- M. Hertneck and F. Allgöwer, “Robust dynamic self-triggered control for nonlinear systems using hybrid Lyapunov functions,” Nonlinear Analysis: Hybrid Systems, vol. 53, p. 101485, 2024, doi: 10.1016/j.nahs.2024.101485.
- D. Meister, F. Aurzada, M. A. Lifshits, and F. Allgöwer, “Time- versus event-triggered consensus of a single-integrator multi-agent system,” Nonlinear Analysis: Hybrid Systems, vol. 53, p. 101494, 2024, doi: 10.1016/j.nahs.2024.101494.
- M. Hertneck, A. I. Maass, D. Nesić, and F. Allgöwer, “An $L_p$-norm framework for event-triggered control,” in Proc. European Control Conf. (ECC), Stockholm, Sweden, 2024, pp. 2818–2824. doi: 10.23919/ECC64448.2024.10591119.
- M. Hertneck, S. Lang, J. Berberich, and F. Allgöwer, “Event-Triggered Control Based on Integral Quadratic Constraints,” IEEE Control Systems Letters, vol. 8, pp. 2039–2044, 2024, doi: 10.1109/LCSYS.2024.3427989.
- M. Seidel, S. Lang, and F. Allgöwer, “On l2-performance of weakly-hard real-time control systems,” European Journal of Control, p. 101056, Jun. 2024, doi: 10.1016/j.ejcon.2024.101056.
- M. Hertneck and F. Allgöwer, “Reverse average dwell time constraints enable arbitrary maximum allowable transmission intervals,” in Proc. 12th IFAC Symp. Nonlinear Control Systems (NOLCOS), Canberra, Australia, 2023, pp. 379–384. doi: 10.1016/j.ifacol.2023.02.064.
- S. Schlor, R. Strässer, and F. Allgöwer, “Koopman interpretation and analysis of a public-key cryptosystem: Diffie-Hellman key exchange,” in Proc. 22nd IFAC World Congress, Yokohama, Japan, 2023, pp. 984–990. doi: 10.1016/j.ifacol.2023.10.1693.
- M. Hertneck and F. Allgöwer, “Self-triggered output feedback control for nonlinear networked control systems based on hybrid Lyapunov functions,” in Proc. 22nd IFAC World Congress, Tokyo, Japan, 2023, pp. 5748–5753. doi: 10.1016/j.ifacol.2023.10.165.
- D. Meister and F. Allgöwer, “Performance implications of different p-norms in level-triggered sampling,” in Proc. 62nd IEEE Conf. on Decision and Control (CDC), Singapore, Singapore, 2023, pp. 3878–3883. doi: 10.1109/CDC49753.2023.10384009.
- D. Meister, F. Dürr, and F. Allgöwer, “Shared Network Effects in Time- versus Event-Triggered Consensus of a Single-Integrator Multi-Agent System,” in 22nd IFAC World Congress, Yokohama, Japan, 2023, pp. 5975–5980. doi: 10.1016/j.ifacol.2023.10.636.
- D. Antunes, D. Meister, T. Namerikawa, F. Allgöwer, and W. P. M. H. Heemels, “Consistent event-triggered consensus on complete graphs,” in Proc. 62nd IEEE Conf. on Decision and Control (CDC), Singapore, Singapore, 2023, pp. 3911–3916. doi: 10.1109/CDC49753.2023.10384026.
- D. Meister, F. Aurzada, M. A. Lifshits, and F. Allgöwer, “Analysis of Time- versus Event-Triggered Consensus for a Single-Integrator Multi-Agent System,” in Proc. 61st IEEE Conf. on Decision and Control (CDC), Cancun, Mexico, 2022, pp. 441–446. doi: 10.1109/CDC51059.2022.9993301.
- M. Hertneck and F. Allgöwer, “Dynamic self-triggered control for nonlinear systems with delays,” in Proc. 9th IFAC Conf. on Networked Systems (NECSYS), Zürich, Switzerland, 2022, pp. 312–317. doi: 10.1016/j.ifacol.2022.07.278.
- M. Hertneck, S. Linsenmayer, and F. Allgöwer, “Efficient stability analysis approaches for nonlinear weakly-hard real-time control systems,” Automatica, vol. 133, p. 109868, 2021, doi: https://doi.org/10.1016/j.automatica.2021.109868.
- J. Berberich, S. Wildhagen, M. Hertneck, and F. Allgöwer, “Data-driven analysis and control of continuous-time systems under aperiodic sampling,” in Proc. 19th IFAC Symp. System Identification (SYSID), Padova, Italy, 2021, pp. 210–215. doi: 10.1016/j.ifacol.2021.08.360.
- M. Hertneck and F. Allgöwer, “A Simple Approach to Increase the Maximum Allowable Transmission Interval,” in Proc. 3rd IFAC Conf. on Modelling, Identification and Control of Nonlinear Systems (MICNON), Tokyo, Japan, 2021, pp. 443–448. doi: 10.1016/j.ifacol.2021.10.390.
- M. Hertneck and F. Allgöwer, “Dynamic self-triggered control for nonlinear systems based on hybrid Lyapunov functions,” in Proc. 60th IEEE Conf. Decision and Control (CDC), Austin, TX, USA, 2021, pp. 533–539. doi: 10.1109/CDC45484.2021.9682784.
- S. Schlor, M. Hertneck, S. Wildhagen, and F. Allgöwer, “Multi-party computation enables secure polynomial control based solely on secret-sharing,” in Proc. 60th IEEE Conf. Decision and Control (CDC), Austin, TX, USA, 2021, pp. 4882–4887. doi: 10.1109/CDC45484.2021.9683026.
- S. Linsenmayer, M. Hertneck, and F. Allgöwer, “Linear Weakly Hard Real-Time Control Systems: Time- and Event-Triggered Stabilization,” IEEE Trans.\ Automat.\ Control, vol. 66, Art. no. 4, 2021, doi: 10.1109/TAC.2020.3000981.
- M. Hertneck, S. Linsenmayer, and F. Allgöwer, “Stabilization of Nonlinear Weakly Hard Real-Time Control Systems,” in Proc. 21st IFAC World Congress, Berlin, Germany, 2020, pp. 2632–2637. doi: 10.1016/j.ifacol.2020.12.307.
- M. Hertneck, S. Linsenmayer, and F. Allgöwer, “Stability Analysis for Nonlinear Weakly Hard Real-Time Control Systems,” in Proc. 21st IFAC World Congress, Berlin, Germany, 2020, pp. 2632–2637. doi: 10.1016/j.ifacol.2020.12.307.
- M. Hertneck, S. Linsenmayer, and F. Allgöwer, “Model-Based Nonlinear Periodic Event-Triggered Control for Continuous-Time Systems with Sampled-Data Prediction,” in Proc. European Control Conf. (ECC), Saint Petersburg, Russia, 2020, pp. 1814–1819.
- M. Hertneck and F. Allgöwer, “Exploiting Information for Decentralized Periodic Event-Triggered Control,” in Proc. 59th IEEE Conf. Decision and Control (CDC), Jeju, South Korea, 2020, pp. 4999–5004. doi: 10.1109/CDC42340.2020.9304456.
- M. Hertneck, S. Linsenmayer, and F. Allgöwer, “Nonlinear Dynamic Periodic Event-Triggered Control with Robustness to Packet Loss Based on Non-Monotonic Lyapunov Functions,” in Proc. 58th IEEE Conf. Decision and Control (CDC), Nice, France, 2019, pp. 1680–1685. doi: 10.1109/CDC40024.2019.9029770.
