


































{kind=link}

Research Assistant
Phone:
+49 711 685 67657
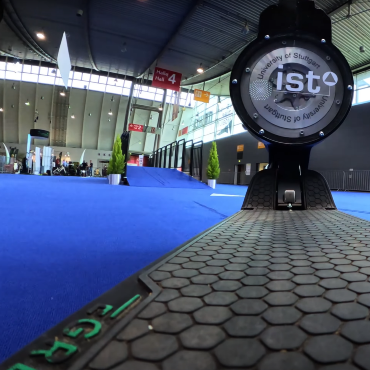
Development of a research prototype of a self-stabilizing and autonomously driving e-scooter, including navigation, environment recognition, and distribution on campus.

The autonomous e-scooter is being developed at the Institute for Systems Theory and Automatic Control under the name eStarling.io. The project is part of the Mobility Living Lab at the University of Stuttgart.

The e-scooter is modified with a reaction wheel so that it balances itself and drives autonomously to the next location. State-of-the-art control technology is used to stabilize the e-scooters despite potential disturbances.

The e-scooters are equipped with sensors that can detect their surroundings, avoid obstacles and navigate autonomously.

Machine learning is used to optimize distribution on campus based on user requests. A special distribution algorithm ensures efficient route planning for the e-scooters. One autonomous e-scooter can replace up to ten conventional e-scooters in a rental system.

Compared to a conventional rental e-scooter, the CO2 emissions of an autonomous rental e-scooter are significantly reduced. Instead of the 6 000 standard e-scooters that would be needed to supply the Vaihingen campus, a fleet would only have to comprise around 600 autonomous e-scooters. By autonomously searching for the inductive charging station, the CO2-intensive, manual collection of the vehicles by so-called “juicers” and their vehicles is no longer necessary.
We work together in a great team of student assistants and research assistants.
We are constantly looking for motivated student assistants who like to help us in this interesting project. If you are interested, feel free to approach us.

[Photos: euRobotics / Visual Outcasts]
[Photos: Universität Stuttgart/ IST, World of Bike, Eine Produktion des ÖAMTC © 2024, Universität Stuttgart/ IST, Universität Stuttgart/ IST, Universität Stuttgart/ IST, Universität Stuttgart/ IST, Universität Stuttgart/ IST, Stegmann and Company, Universität Stuttgart/ IST, Universität Stuttgart/ IST, Universität Stuttgart/ SimTech, Universität Stuttgart/ SimTech, Universität Stuttgart/ IST, Universität Stuttgart/ SimTech, Scooterhelden, Universität Stuttgart/ IST]
[Photos: Universität Stuttgart/ IST, Universität Stuttgart, Universität Stuttgart/ IST, Universität Stuttgart/ IST, Universität Stuttgart/ School For Talents, Universität Stuttgart/ IST, Universität Stuttgart, Universität Stuttgart/ IST]
[Photos: Universität Stuttgart/ Uli Regenscheit, Universität Stuttgart/ Uli Regenscheit, KIT/AServ, Universität Stuttgart/ IST, Lichtgut/Max Kovalenko, Universität Stuttgart/ IST]



