

























{kind=link}

Wissenschaftlicher Mitarbeiter
Telefon:
+49 711 685 66311
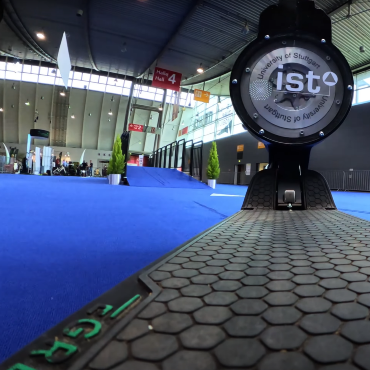
Entwicklung eines Forschungsprototypens eines selbst-stabilisierenden und autonom fahrenden E-Scooters, inklusive Navigation, Umgebungserkennung und Verteilung auf dem Campus.

Der autonom fahrende E-Scooter wird am Institut für Systemtheorie und Regelungstechnik unter dem Name eStarling.io entwickelt. Das Projekt ist Teil des Mobility Living Lab der Universität Stuttgart.

Der E-Scooter ist durch ein Reaktionsrad so modifiziert, dass er selbst balanciert und autonom zum nächsten Einsatzort fährt. Hierbei kommt modernste Regelungstechnik zum Einsatz, um die E-Scooter trotz potenzieller Störungen zu stabilisieren.

Die E-Scooter sind mit Sensoren ausgestattet, die ihre Umgebung erfassen können, Hindernissen ausweichen und autonom navigieren.

Durch maschinelles Lernen erfolgt eine optimale Verteilung auf dem Campus basierend auf Nutzeranfragen. Ein spezieller Verteilalgorithmus gewährleistet eine effiziente Routenplanung für die E-Scooter. Ein autonomer E-Scooter kann in einem Verleihsystem bis zu zehn herkömmliche E-Scooter ersetzen.

Im Vergleich zu einem gängigen Leih-E-Scooter reduziert sich der Ausstoß von CO2 bei einem autonom fahrenden Leih-E-Scooter deutlich. Statt 6.000 Standard E-Scootern, die für eine Versorgung des Campus Vaihingen nötig wären, müsste eine Flotte nur noch ca. 600 autonome E-Scooter umfassen. Durch das selbständige Aufsuchen der induktiven Ladestation entfällt das CO2-aufwändige, manuelle Einsammeln der Fahrzeuge per so genannter „Juicer“ und deren Fahrzeuge.
Wir arbeiten gemeinsam in einem großartigen Team aus studentischen Hilfskräften und wissenschaftlichen Mitarbeitern.
Wir sind immer auf der Suche nach weiteren motivierten studentischen Hilfskräften, die uns bei diesem interessanten Projekt unterstützen möchten. Bei Interesse können Sie sich gerne bei uns melden.

[Fotos: Stegmann and Company, Universität Stuttgart/ IST, Universität Stuttgart/ IST, Universität Stuttgart/ SimTech, Universität Stuttgart/ SimTech, Universität Stuttgart/ IST, Universität Stuttgart/ SimTech, Scooterhelden, Universität Stuttgart/ IST]
[Fotos: Universität Stuttgart/ IST, Universität Stuttgart, Universität Stuttgart/ IST, Universität Stuttgart/ IST, Universität Stuttgart/ School For Talents, Universität Stuttgart/ IST, Universität Stuttgart, Universität Stuttgart/ IST]
[Fotos: Universität Stuttgart/ Uli Regenscheit, Universität Stuttgart/ Uli Regenscheit, KIT/AServ, Universität Stuttgart/ IST, Lichtgut/Max Kovalenko, Universität Stuttgart/ IST]


